Израильский инженер разрабатывает шестиногих 3D-печатных роботов
17 Января 15Израильский инженер разрабатывает шестиногих 3D-печатных роботов
Одним из направлений 3D-печатного дизайна, завоевавшим популярность за прошедший год, стало конструирование интерактивных устройств, контролируемых с помощью микроконтроллеров Arduino и Raspberry Pi. Эти платы не только весьма доступны с точки зрения стоимости, но и достаточно легки в использовании. Как результат, все большее число печатников берутся за создание функциональных, динамических моделей. Одним из таких энтузиастов является Джонатан Спитц, инженер-механик из Техниона – Израильского технологического института в Хайфе.
За основу своего проекта Спитц взял наработки коллеги из Калифорнийского университета в Беркли. Тот проект, под названием «STAR», был направлен на создание 3D-печатных роботов, способных изменять развал ходовой части для оптимизации проходимости по гладким и неровным поверхностям. STAR известен как самый быстрый «ползающий» робот, способный достигать скорости в 5,2 метра в секунду.
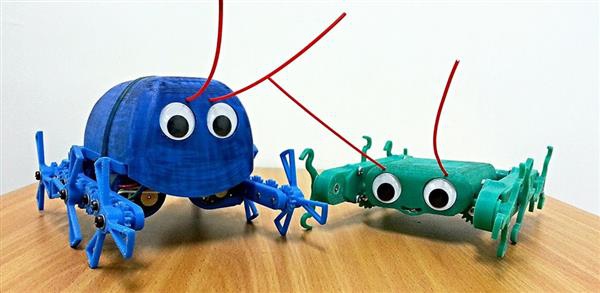
Первая версия роботов Спитца, названная страшный великан, рыжий и усатый «Billy», стала результатом нескольких последовательных переделок. Все необходимые механические части Спитц создал с помощью 3D-принтера. После непродолжительного программирования контроллера Arduino Leonardo, Billy «встал на ноги» и продемонстрировал завидную резвость. В движение Billy приводится двумя DC моторами – по одному на каждый бок робота. Последовательная шестеренчатая передача синхронно приводит в движение ноги. Управление роботом осуществляется с помощью смартфона и интерфейса Bluetooth.
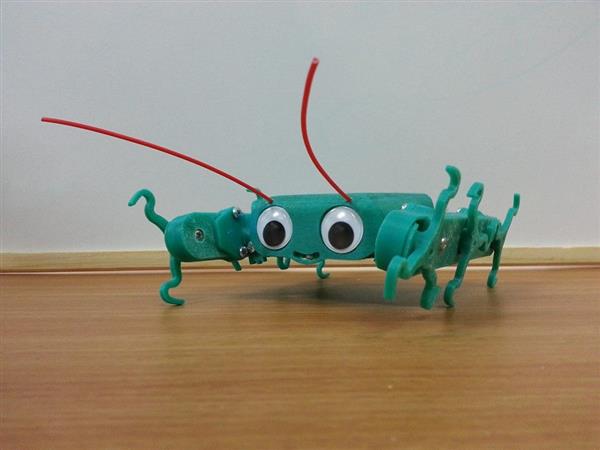
Набравшись опыта при постройке Billy, Спитц взялся за следующий, более компактный и на 40% более легкий дизайн, получивший название «Charlie». Charlie несколько более сложен в исполнении: в дополнение к Arduino используются два микроконтроллера Polulu Baby Orangutan. Последние предназначены непосредственно для управления приводом, состоящим из четырех моторов, а Arduino высвобождается для обработки данных с гиростабилизатора. Charlie также управляется посредством беспроводного соединения. Благодаря более тонкому корпусу, Charlie способен передвигаться даже в перевернутом состоянии.
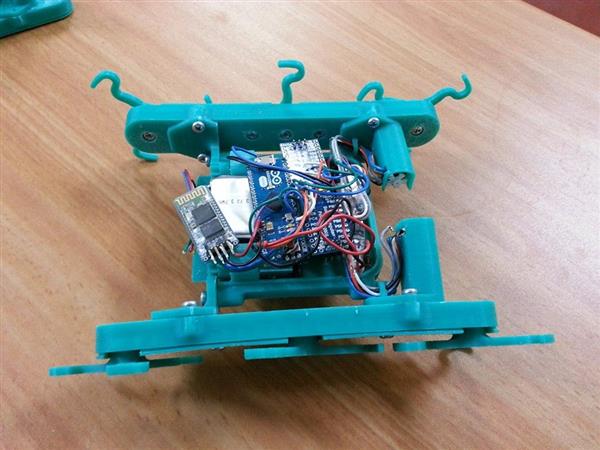
Два двигателя по-прежнему используются для привода ног, а два других регулируют развал для повышенной проходимости на неровных поверхностях. В результате Charlie умеет карабкаться по склонам с углом более 45% и перелезать через препятствия такой же высоты, как и он сам. Еще одним усовершенствованием стал закрытый корпус, защищающий механизмы от пыли, грязи и травы.
Оба робота были напечатаны ABS-пластиком на 3D-принтере UP! Plus 2. Billy состоит из 20 частей, в то время как более совершенный Charlie требует печати 38 деталей. Печать и того и другого заняла около суток.
Подписаться
Актуальные новости рынка инноваций


