Изобретатель собрал роборуку с искусственными мышцами
26 Февраля 15Изобретатель собрал роборуку с искусственными мышцами
Создание протезов для людей – очень благородная профессия, и пользователь Instructables mikey77 должен знать это, как никто другой. Мы не будем рассказывать о том, какую пользу может принести 3D-печатная рука с силиконовыми мышцами. Mikey77 безусловно заслуживает уважение за свою работу, которая сочетает в себе уже имеющиеся достижения и открывает массу возможностей для будущих свершений.
Впервые Mikey77 упомянул о 3D-печатных мышцах в своем блоге на Instructables два месяца назад. Сейчас роборука с искусственными мышцами готова, и со слов разработчика, «ее можно использовать как полноценный протез человеческой руки». Mikey77 считает, что не обязательно скрупулезно следовать всем его инструкциям и печатать руку целиком, достаточно лишь понять его идею и позаимствовать кое-какие ценные советы. Кроме того, он намерен продолжить работу над пальцами руки, чтобы сделать их более совершенными.
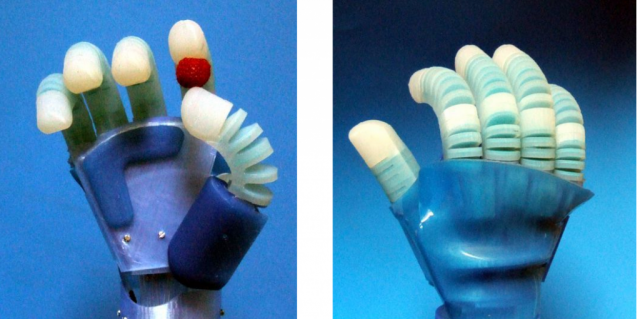
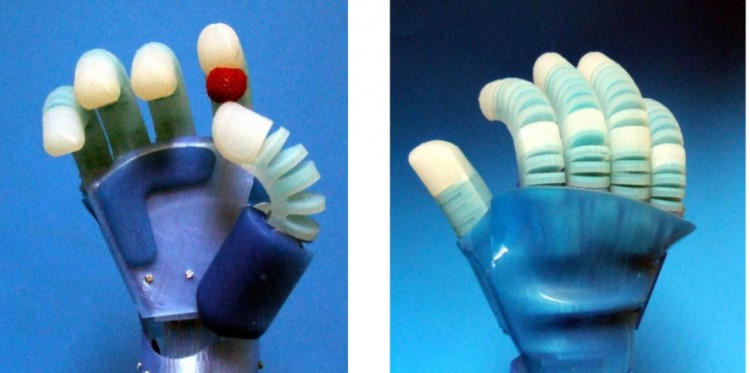
Для начала mikey77 говорит (шаг 1), что его рука работает на сжатом воздухе, который позволяет ей мягко сжиматься. Чтобы понять, как он ее сделал, обратите внимание на настройки и материалы (шаг 2). Mikey77 напечатал детали из PLA на 3D-принтере MakerBot Replicator 2 на следующих настройках: стандартное разрешение, заполнение 10%, 2 оболочки, толщина слоя 0,2 мм. В качестве материалов он использовал жидкий силикон Dragon Skin 20 (из-за его высокой гибкости и текучести), 100% силиконовый герметик, кукурузный крахмал, пластмассовые трубки диаметром 3,2 мм, силиконовые трубки диаметром 3,2 мм, детали для регулятора, детали для сборки схемы нейронов и шесть гаек и винтов с круглой головкой 4-40 x 19 мм.

В пошаговой инструкции он подробно показывает, как печатаются все детали руки (шаг 3). Здесь все просто. Четыре кости руки управляют четырьмя пальцами. Еще две кости управляют мышцами большого пальца и костями четырех пальцев. Теперь (шаг 4) можно воспользоваться напечатанными молдами для изготовления искусственных мышц. Каждый палец изготавливается в отдельной форме. У каждого пальца есть 3 мышцы, мягкие кости между мышцами и кончик пальца (каждая мышца работает благодаря двум воздушным каналам). Поскольку три пальца одной длины, они изготавливаются в одной форме. Мизинец изготавливается в своей форме, потому что он на 10% короче. У большого пальца тоже своя форма, плюс он изготавливается с применением другого метода отливки мышц из силикона (шаг 5).
Кости. Мышцы. Что еще нужно роботу? Правильно! Кожа. На следующем этапе (шаг 6) mikey77 рассказывает, как изготовить съемную кожу с помощью файла Skinmold.stl и листа акрила. Здесь он использует два вида молдов: для ладони и подушечек большого пальца. Также он ищет варианты оформления тыльной стороны руки, чтобы всегда иметь свободный доступ к внутренним устройствам.
Теперь (шаг 7) мы добрались до пневматического регулятора, управляющего 11 мышцами. Он собран с применением 13 электромагнитных клапанов и воздушного компрессора 12 В. Шаги 8 и 9 довольно сложные, потому что здесь речь идет осхеме нейронов и удаленном коде активации. Но mikey77 постарался объяснить все максимально подробно, а также дал ссылки на другие свои записи на Instructables и привел полный список всех кодов.

По всей видимости, mikey77 не собирается останавливаться на достигнутом. Последний этап (шаг 10) называется «Дополнительные возможности». Звучит многообещающе, а как же иначе, ведь он планирует добавить ножной компрессор для управления мышцами, сухожилия, которые сделают движения руки более плавными, и новые нагнетательные клапаны, чтобы сделать пальцы более сильными, а также хочет увеличить количество мышц до 4 или 5.
Мы точно не знаем, в каком направлении будет двигаться mikey77 и те пользователи, которые решат повторить его опыт, но мы уверены на 100%, что вновь услышим о нем в самом ближайшем будущем.
Подписаться
Актуальные новости рынка инноваций


